So I want to do the brake release motion through code and then move to gui for initial testing.
I do:
req.setParameter("root/Control/gotoJogMode", 0).get()
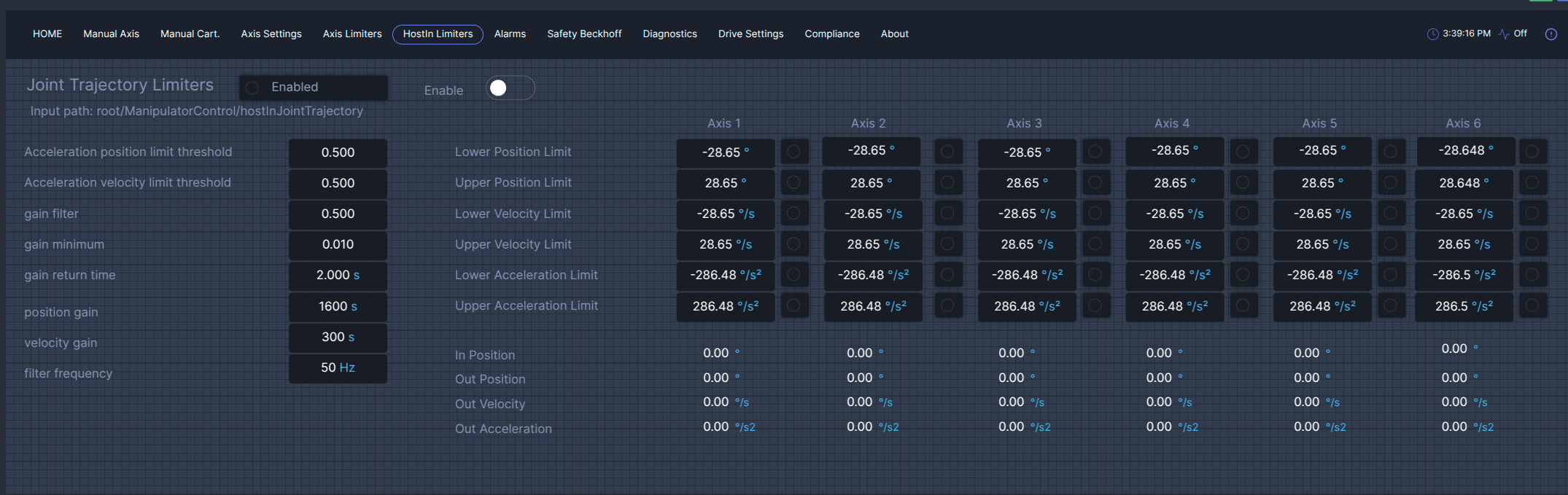
req.setParameter("root/Control/jointTrajectoryLimiters/pvaLimiter02/w", 20).get()
req.setParameter("root/Control/jointTrajectoryLimiters/pvaLimiter01/w", 20).get()
then give a position:
req.setParameter("root/Control/hostInJointTrajectory", 0.5, offset=0).get()
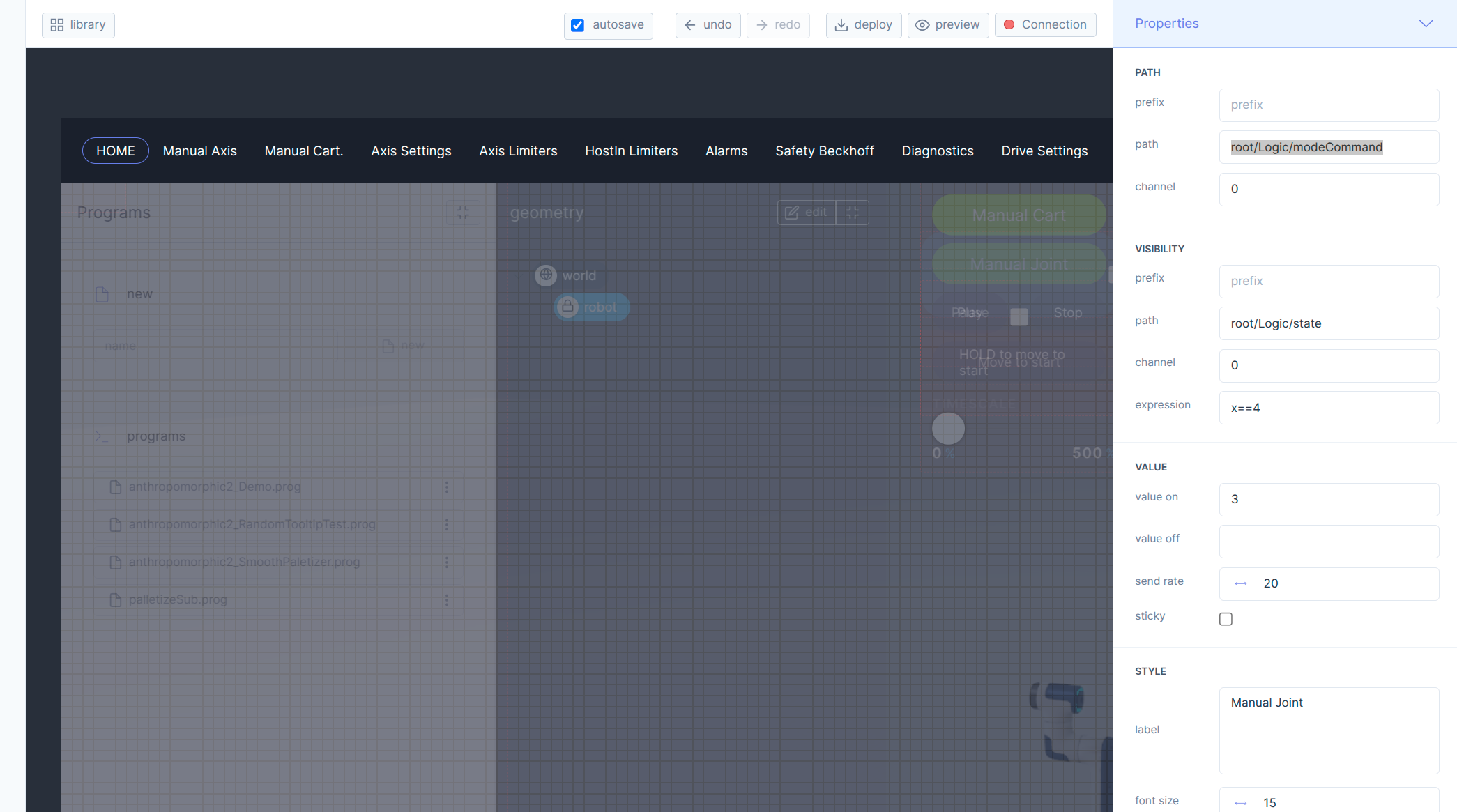
now when I turn on Manual Cart mode in gui, the robot jerks and stops all of a sudden. I revert all the params after doing my motion and add sleep before switching to manualCart, still the same behaviour.