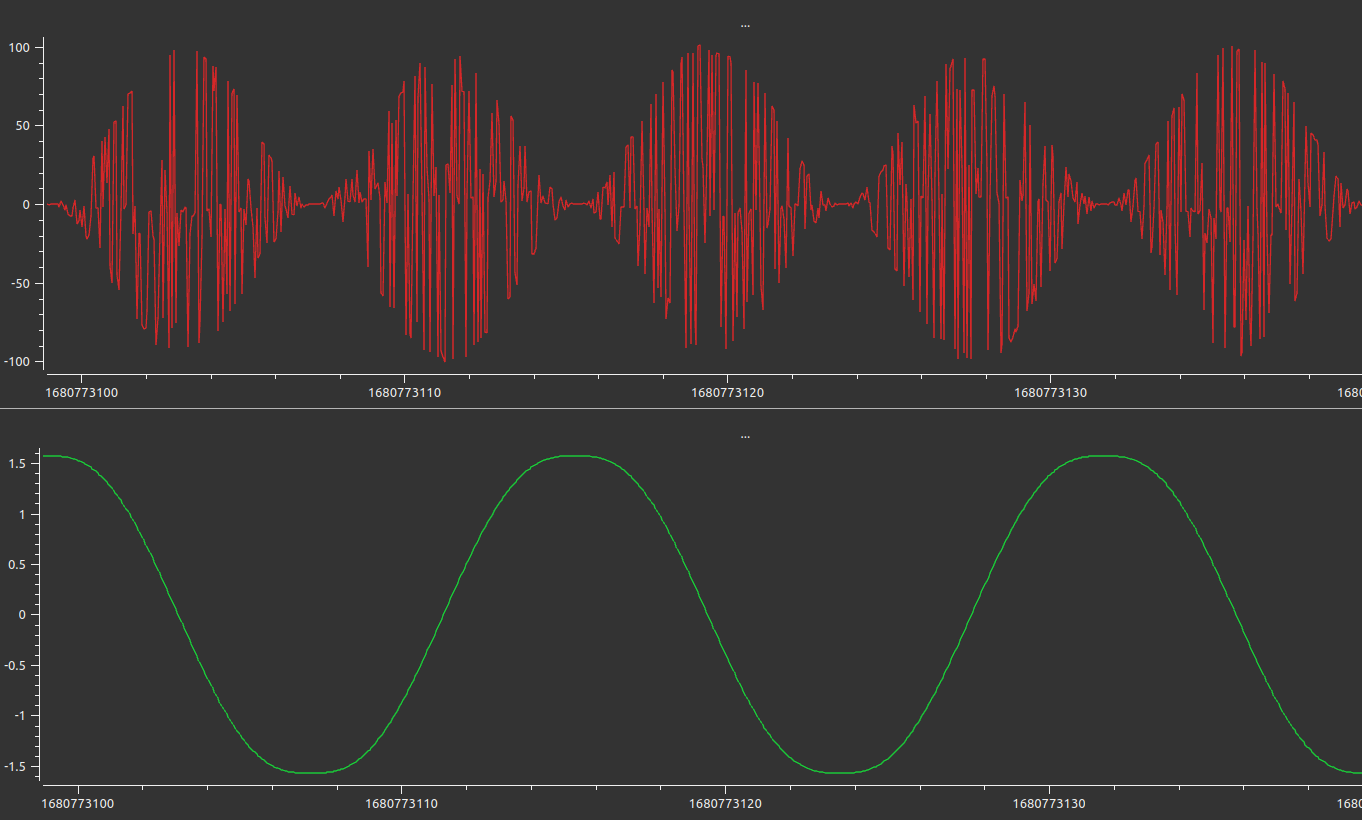
Looking at your position signal:
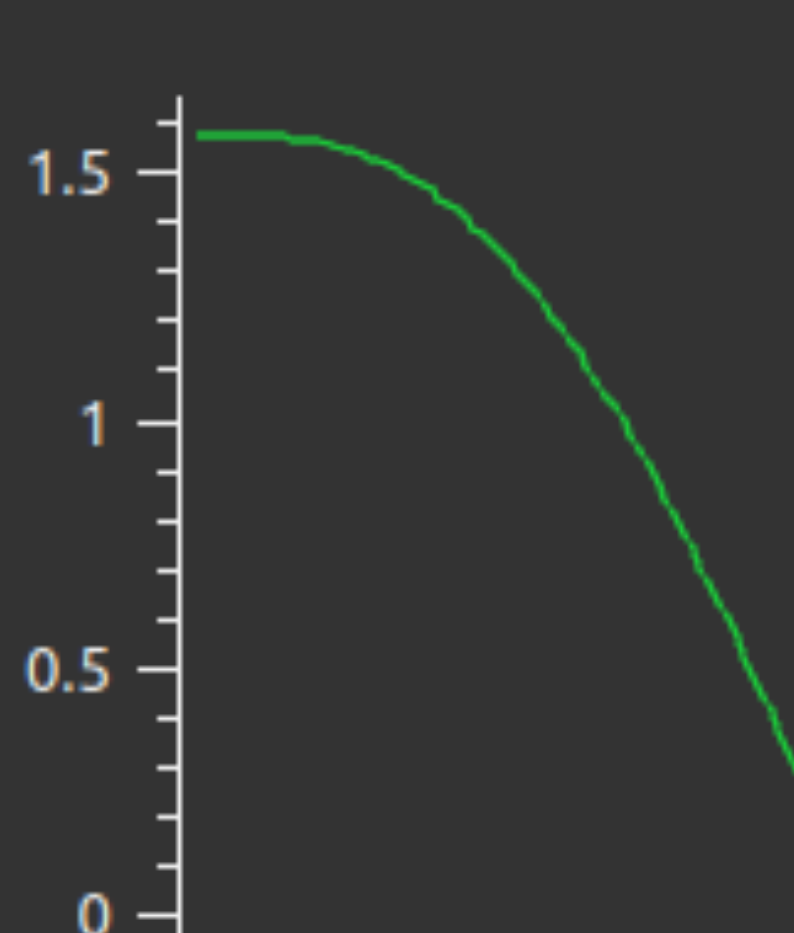
This does not look very smooth and impacts the quality of the velocity and acceleration signal.
Do you have a lot of jitter on the cycle time (see fon instance the root/Fieldbus_task/actual_cycle_max
)? Are you running MCX-RTOS? On which hardware? If you use RaspberryPi we know that realtime performance is not very good.