I recommend you to use, Robot App 1.7.5 from the store,
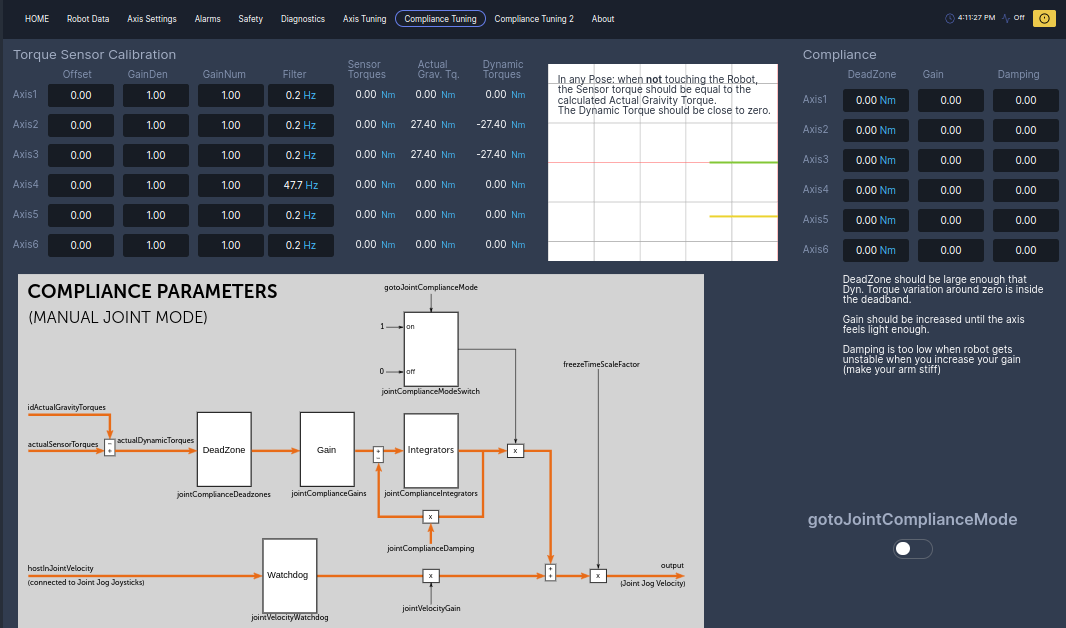
There is a Tab Torque Sensor Calibration
In the standard, Robot APP GUI there is no collision detection, use desk to search for the paths:
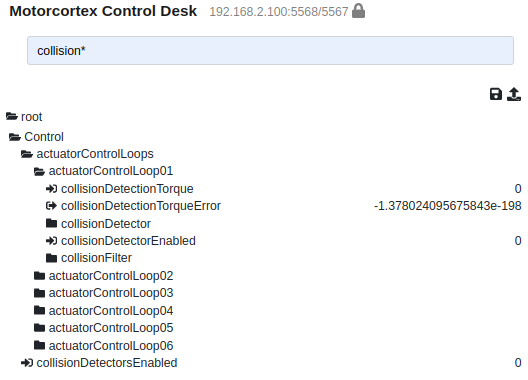
For Collision Detector you need to link PDO entrie TorqueSensor Actual value to motorcortex parameter:
For example:

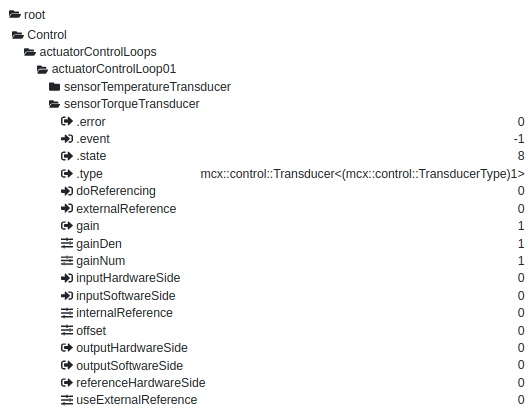
Also i recommend to checkout the sensor torqueTransducer: