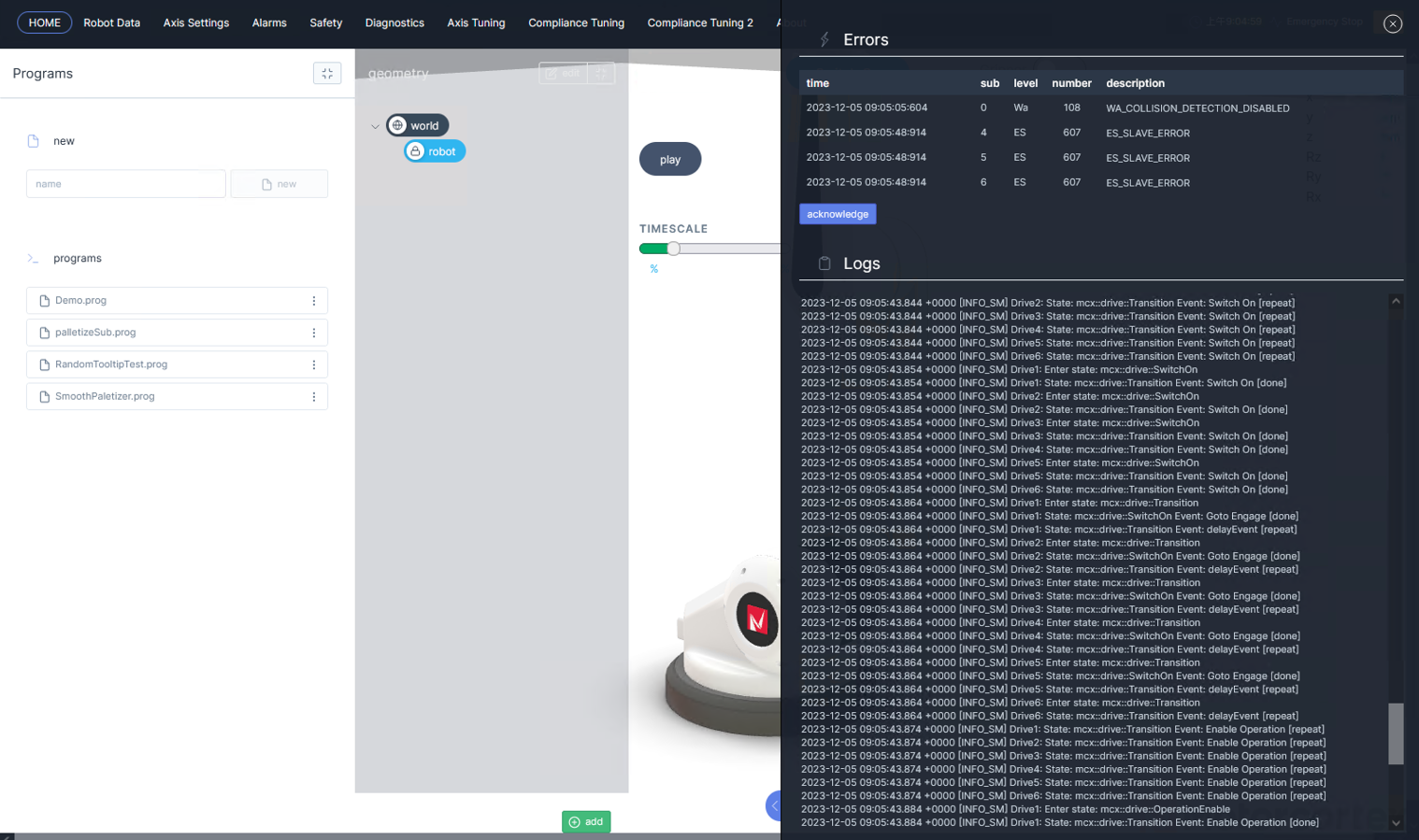
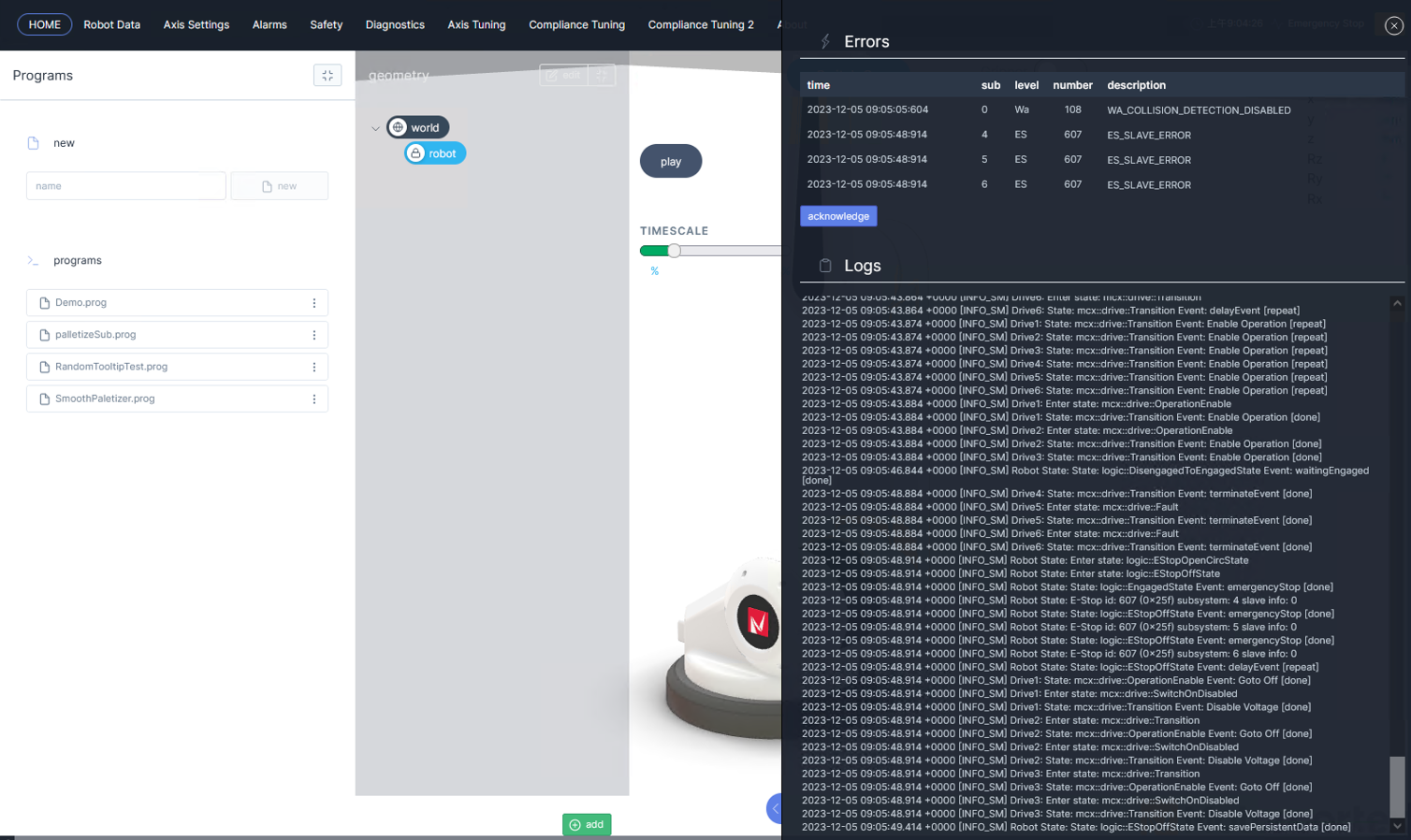
Sorry,
the second drive had a Control circuit voltage drop error,
because error message show EStopOpenCircState I thought there were some issue in my config file,
so I didn't notice drive had error.
But when drivers is in error state,
controller can't reset the drive error after press acknowledge button?
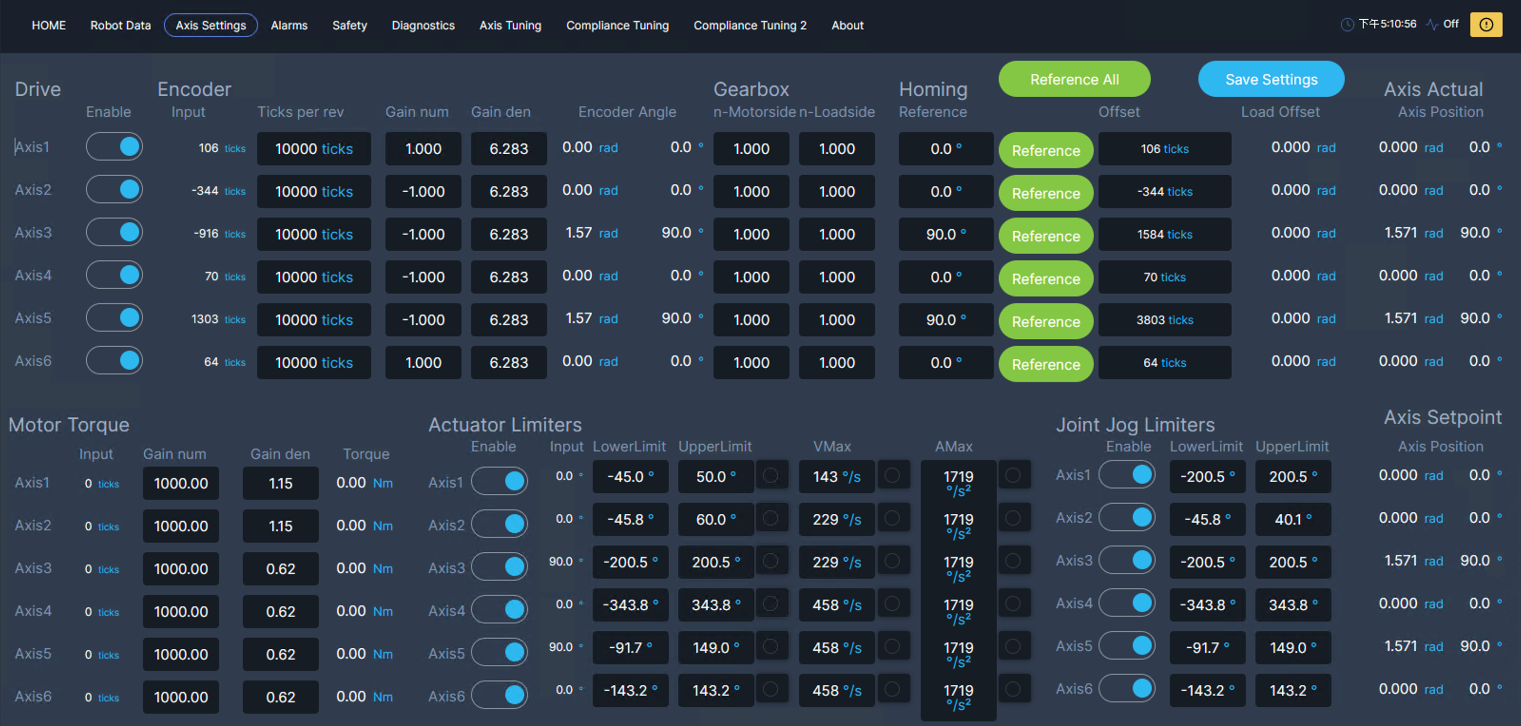
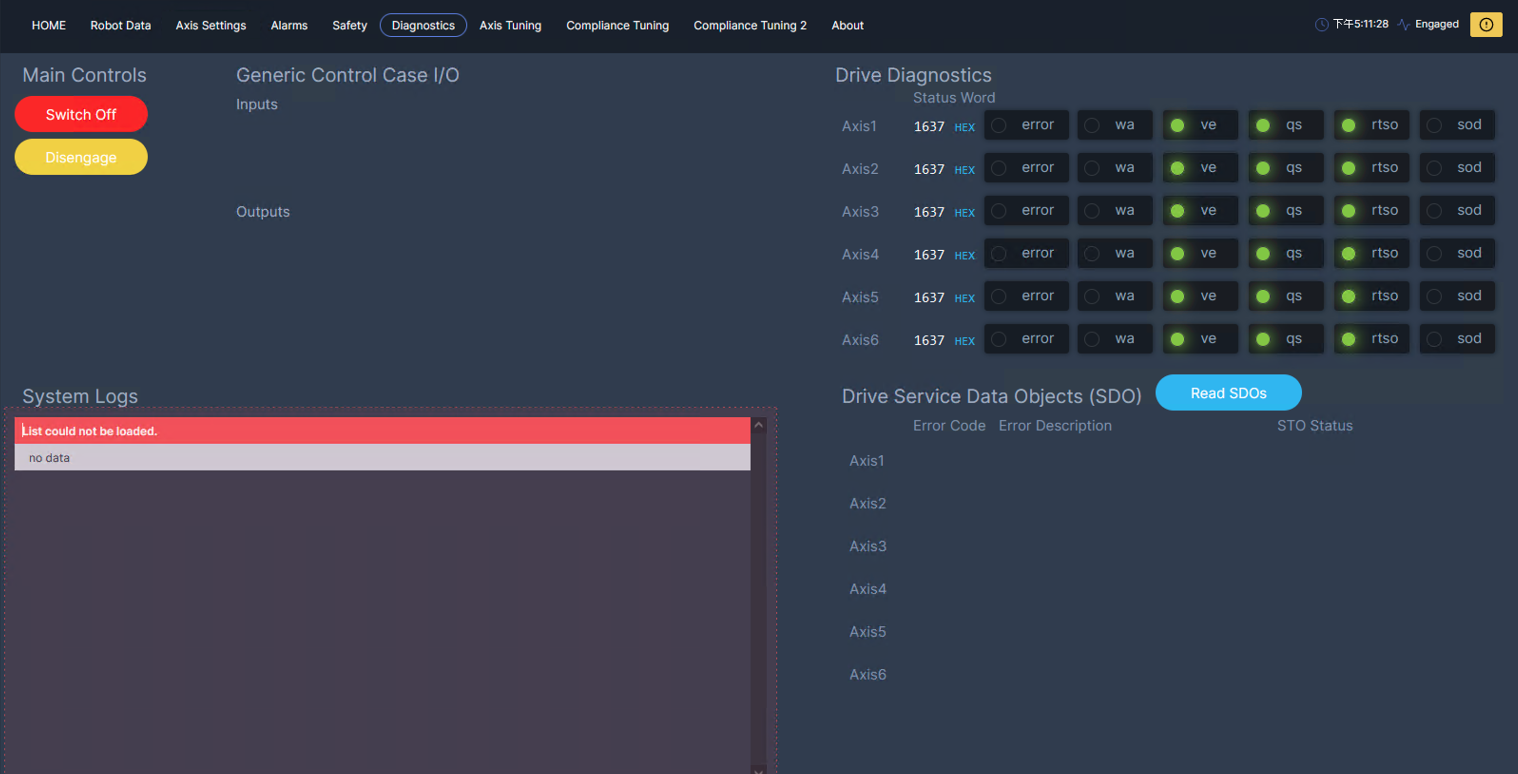
So now GUI can get the statusword of each joint and go to Engage:
By the way,
after employ config or using sudo motorcortex restart when arrival 30min connection limit,
the Angle value of each joint will be very large,
so I need to press Reference All button every time,
how can controller record the offset?
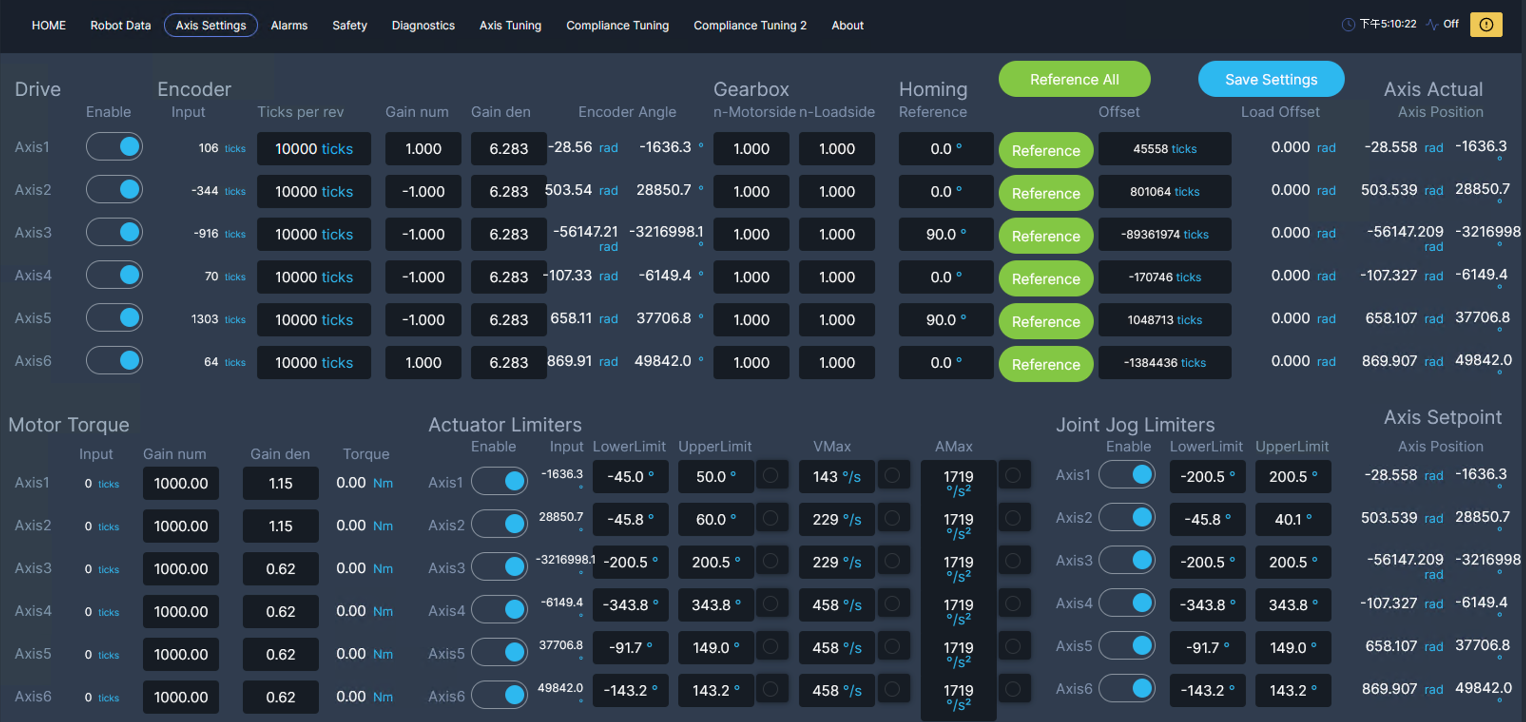
After press Reference All button: