In the application Robot App - 6Axis Anthropomorphic 2024.01, the mechanism was updated and cannot perform change of TCP.
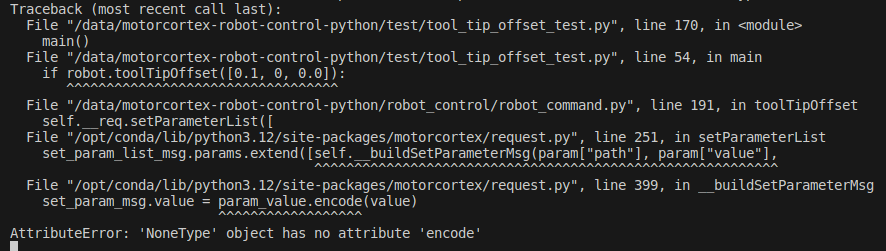
When running tool_tip_offset_test.py, this is the error:
Here is how I made a workaround in robot_control/robot_command.py by replacing the definition.
But here, I don't use fade_time (and I also don't know what is it for):
Is there a possibility to provide a bit more elegant solution than this workaround (either by updating the python package or program itself)?
{
def toolTipOffset(self, tool_tip_offset):
if self.manualJointMode():
fade_time = 0.2
self.__req.setParameterList([
{
"path": "root/ManipulatorControl/mechanism/tool/tippose",
"value": tool_tip_offset
}]).get()
self.__kinematics_update_counter = self.__kinematics_update_counter + 1
time.sleep(fade_time)
return True
return False
}
```