Hi all,
I'm using Motorcortex software to command our Robot mounted on our AMR.
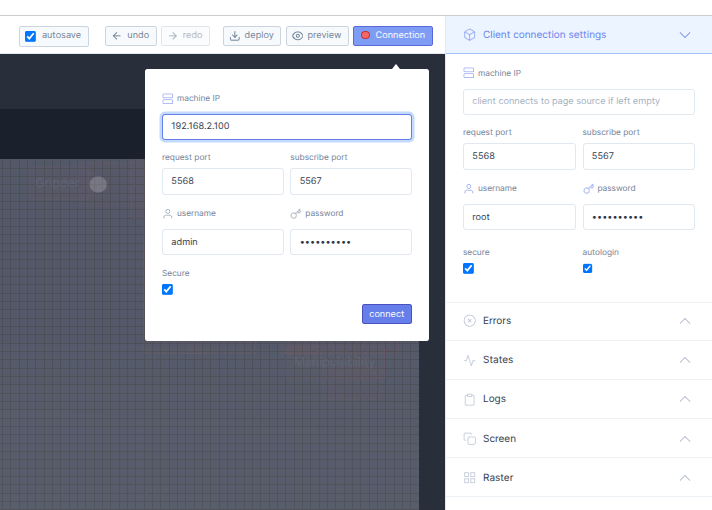
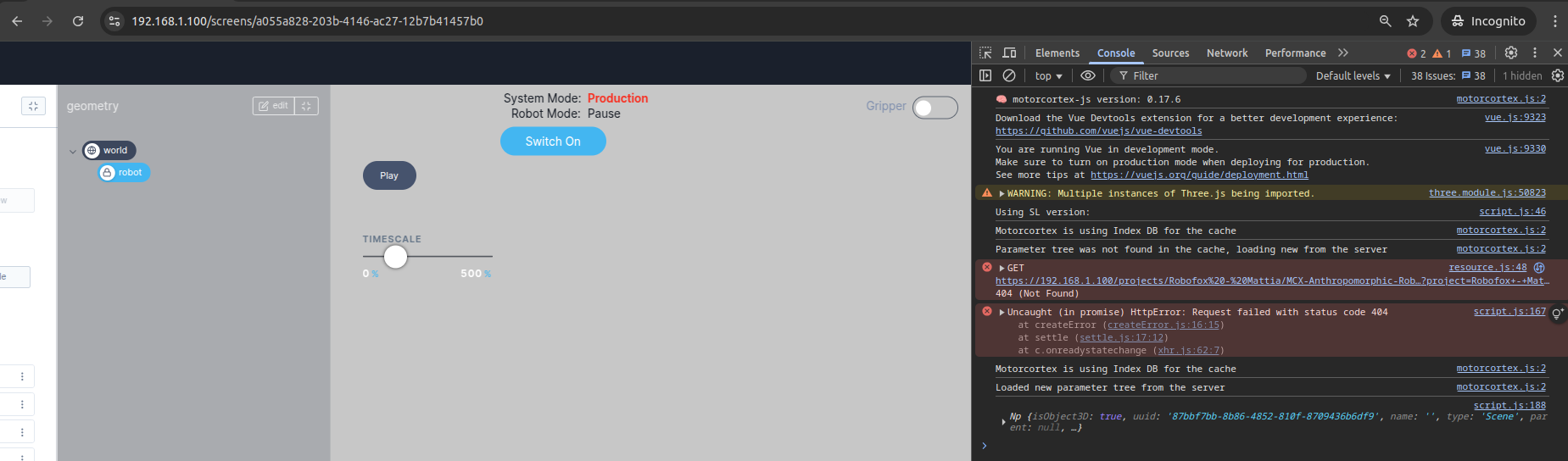
So at the moment when I turn on the robot, I will connect via Wifi using browser GoogleChrome ( with the cert installed ) to the 192.168.X.Y and the Gui appears and everything works...
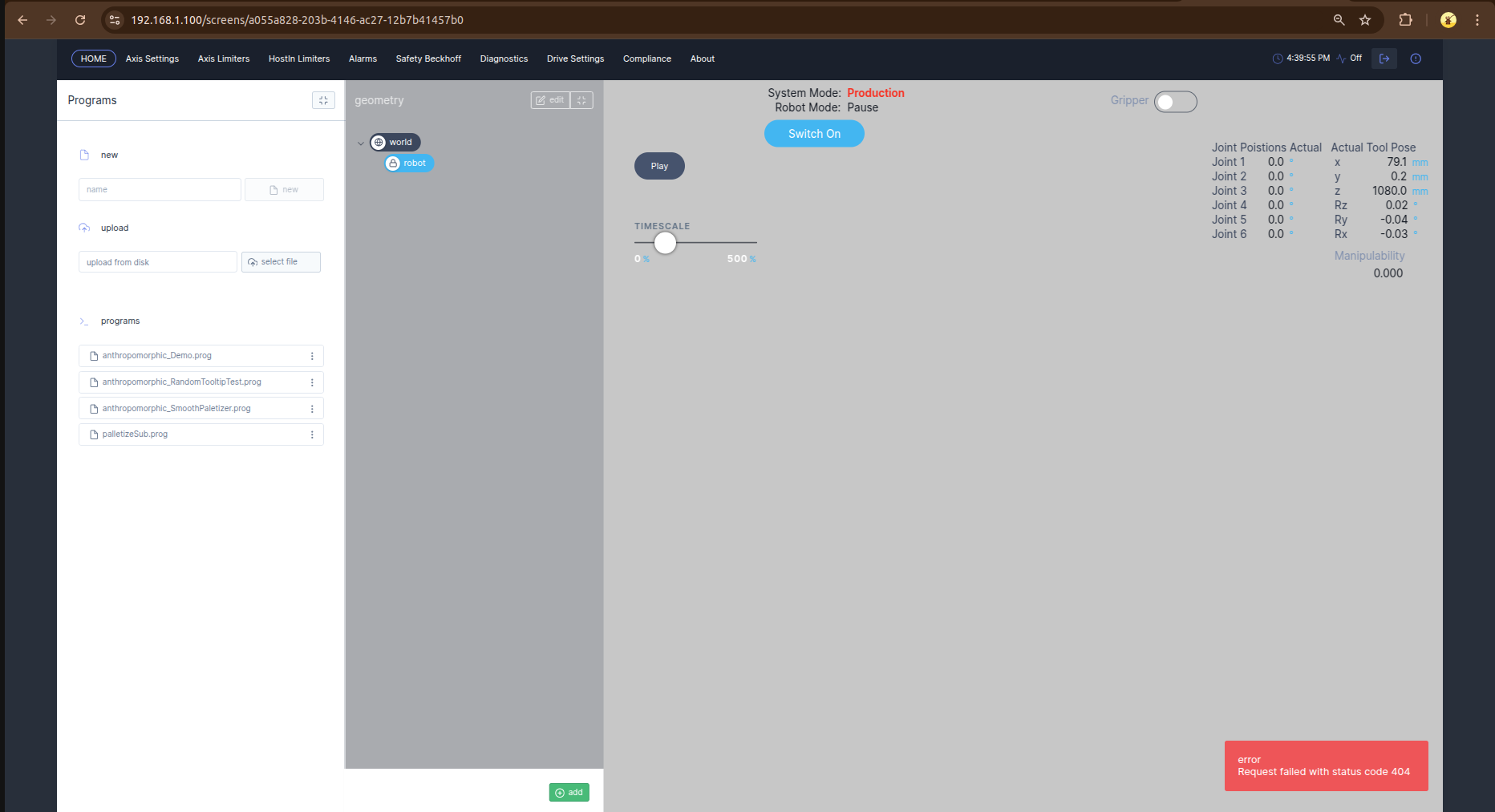
After a couple of minutes the error on the gui appears The GUI is disconnected, connecting to....192.168.X.Y, and I can't reconnect even if I reload the page.
I checked the following points:
- there is only one GRID deployed
- the https certs installed on the browser
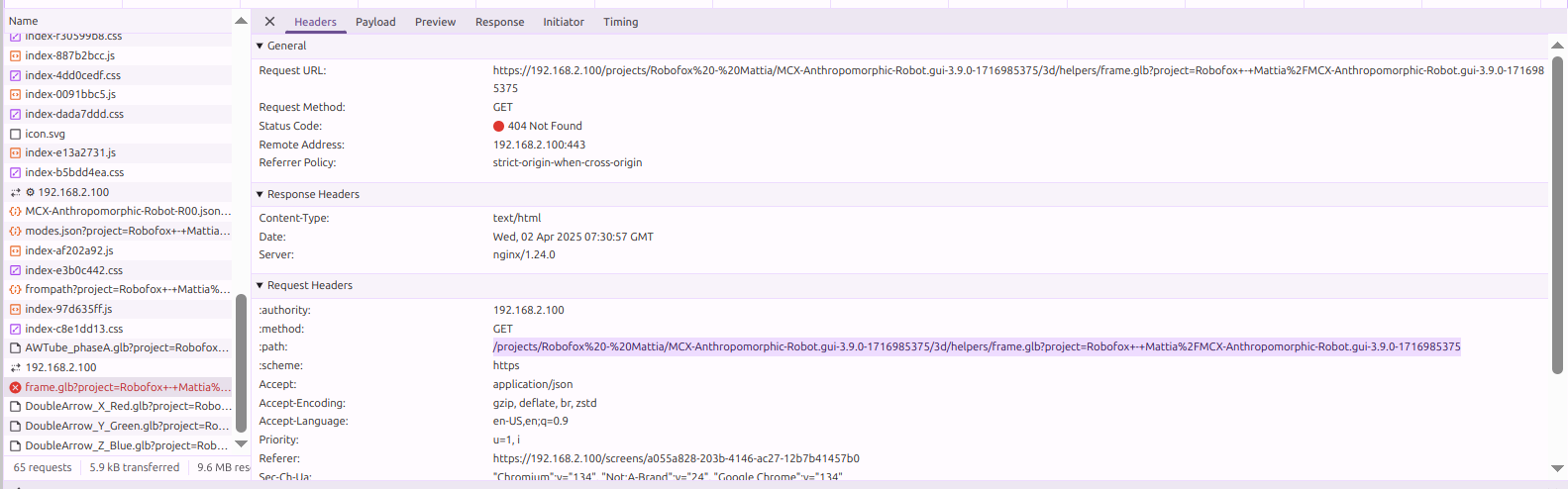
The "Inspection" tool show me the error
t.websocket.rejectUnauthorized```
and the log of the controller:
--> Start of log_2025-03-28_07-37-35.dat
2025-03-28 07:37:35.340 +0000 [INFO] Real-time mode enabled
2025-03-28 07:37:35.920 +0000 [INFO] Configuration:
Motorcortex-core version: 2.13.0-2-ga425732_release
Robot-app version: 3.0.10-0-gf74c4f3_release
Motorcortex-core version: 2.13.0-2-ga425732_release
Motorcortex-math version: 2.6.1-0-g4f8e1b7_release
Motorcortex-control version: 3.6.0-0-g9bd6aab_release
Motorcortex-motion version: 3.0.5-0-g9311fee_release
Hardware key: 15767076192219547437
List of components: mcx-core2 mcx-io2 mcx-math2 mcx-mechanics1 mcx-motion3 mcx-control33 mcx-robot-app3
List of features: AxesControl#6 Bartending#0 Joystick#0 MachineControl#0 ManipulatorControl#1 SafetyChannelSelector#0 SetpointGenerator#0 SignalGenerator#0 Tool6DofAdmittance#0 UdpComm#0 UserFrame#0 WeavingMotion#0
License is not valid (error type: 128 info: 1), failed to verify. License does not include components: mcx-motion3.
Configuration file: /etc/motorcortex/config/config.json
{
"AxisControl": {
"Enable": true,
"NumberOfAxes": 6
},
"Bartending": {
"Amount": 1,
"Enable": true
},
"Drive": "cia402",
"Joystick": {
"Amount": 3,
"Device_0": "/dev/input/js0",
"Device_1": "/dev/input/js1",
"Device_2": "/dev/input/js2",
"Enable": false
},
"MachineControl": {
"Enable": false,
"Linking": "machine_control_links.json",
"NumberOfJoints": 3
},
"ManipulatorControl": {
"Enable": true
},
"Mode": "Production",
"Path": {
"Control": "control/control.xml",
"ExternalReset2": "scripts/r16chksum_workaround_stage1.sh 3 4 5 6 7 8",
"Fieldbus": "io/master.xml",
"License": "15767076192219547437.lic",
"Link": "",
"Linking": "linking.json",
"Log": "/var/www/motorcortex/log",
"Mechanism": "mech/mech-parameters.xml",
"Persistence": "control/persistence.bin",
"UserParameters": "user/parameters.json",
"_License": "/home/admin/15767076192219547437.lic"
},
"Realtime": {
"Allocate": 16,
"Isolate": [
0,
1
]
},
"Server": {
"Default": {
"Certificate": "/etc/ssl/certs/motorcortex.pem",
"Direction": "listen",
"Login": "disable",
"URL": "wss://*:5568:5567"
}
},
"SetpointGenerator": {
"Amount": 3,
"Enable": true,
"Linking": "setpoint_generator.links.json"
},
"SignalGenerator": {
"Amount": 3,
"Enable": true,
"Linking": "signal_generator.links.json"
},
"SpaceNav": {
"Device": "/dev/input/by-id/usb-3Dconnexion_3Dconnexion_Universal_Receiver-event-joystick",
"Device2": "/dev/input/by-id/usb-3Dconnexion_SpaceMouse_Wireless_Receiver-event-joystick",
"Enable": false
},
"Task": {
"Comm_task": {
"Dt": 1000,
"Sched": "Normal"
},
"Control_task": {
"Cpu": [
0
],
"Dt": 1000,
"Prio": 80,
"Sched": "Realtime"
},
"Fieldbus_task": {
"Cpu": [
1
],
"Dt": 1000,
"Prio": 80,
"Sched": "Realtime"
},
"IO_task": {
"Dt": 1000,
"Sched": "Realtime"
},
"Logger_task": {
"Dt": 1000,
"Sched": "Normal"
},
"Logic_task": {
"Dt": 10000,
"Sched": "Realtime"
},
"Simulator_task": {
"Dt": 1000,
"Sched": "Realtime"
}
},
"Tool6DofAdmittance": {
"Amount": 1,
"Enable": true
},
"UserFrame": {
"Amount": 6,
"Enable": true
},
"WeavingMotion": {
"Amount": 0,
"Enable": false
},
"XsensIMU": {
"Device": "/dev/ttyUSB0",
"Enable": false
}
}
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: adding 3 SignalGenerator
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: adding 3 SetpointGenerator
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: Joystick is disabled in the configuration
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: adding 6 AxisControl
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: MachineControl is disabled in the configuration
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: adding 1 Tool6DofAdmittance
2025-03-28 07:37:35.920 +0000 [INFO] App Feature: adding 1 Bartending
2025-03-28 07:37:35.930 +0000 [INFO] Task Logger_task stack is 1048576 bytes
2025-03-28 07:37:35.970 +0000 [WARNING] FK solver is not set, taking the default one
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::Idle
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::StopCommand
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl:😛rogramReceived
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::NoCommand
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::MotionNotAllowed
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::MoveCommand
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::Moving
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::SetCommand
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::WaitCommand
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::MoveToStartCommand
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Initialized state: mcx::motion::motion_sl::CheckStatusFailed
2025-03-28 07:37:35.115 +0000 [INFO_SM] MotionSL: Enter state: mcx::motion::motion_sl::Idle
2025-03-28 07:37:35.247 +0000 [INFO] Using EtherCAT XML Parser 2.0
2025-03-28 07:37:35.247 +0000 [INFO] DC is excluded
2025-03-28 07:37:35.247 +0000 [INFO] DC is excluded
2025-03-28 07:37:35.247 +0000 [INFO] DC is excluded
2025-03-28 07:37:35.248 +0000 [INFO] DC is excluded
2025-03-28 07:37:35.259 +0000 [INFO] EtherCAT module (single system mode), Name: Ethercat, Master Id: 0, System Mode: Production
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive::Transition
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive::SwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive:😮perationEnable
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive::QuickStopActive
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Initialized state: mcx::drive::Fault
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive1: Enter state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO] Created drive: Drive1, type: 1, system mode: Production
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive::Transition
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive::SwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive:😮perationEnable
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive::QuickStopActive
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Initialized state: mcx::drive::Fault
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive2: Enter state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO] Created drive: Drive2, type: 1, system mode: Production
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive::Transition
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive::SwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive:😮perationEnable
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive::QuickStopActive
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Initialized state: mcx::drive::Fault
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive3: Enter state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO] Created drive: Drive3, type: 1, system mode: Production
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive::Transition
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive::SwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive:😮perationEnable
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive::QuickStopActive
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Initialized state: mcx::drive::Fault
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive4: Enter state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO] Created drive: Drive4, type: 1, system mode: Production
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive::Transition
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive::SwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive:😮perationEnable
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive::QuickStopActive
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Initialized state: mcx::drive::Fault
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive5: Enter state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO] Created drive: Drive5, type: 1, system mode: Production
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive::Transition
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive::SwitchOn
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive:😮perationEnable
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive::QuickStopActive
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Initialized state: mcx::drive::Fault
2025-03-28 07:37:35.267 +0000 [INFO_SM] Drive6: Enter state: mcx::drive::NotReadyToSwitchOn
2025-03-28 07:37:35.267 +0000 [INFO] Created drive: Drive6, type: 1, system mode: Production
2025-03-28 07:37:35.271 +0000 [INFO] Module is enabled: /etc/motorcortex/config/user/parameters.json
2025-03-28 07:37:35.279 +0000 [INFO] Task Fieldbus_task stack is 1048576 bytes
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::InitMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic:😛auseMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic:😛auseToSemiAutoModeTransition
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic:😛auseToAutoRunModeTransition
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic:😛auseToMoveToStartModeTransition
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic:😛auseToManualJointModeTransition
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic:😛auseToManualCartModeTransition
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::ToPauseModeTransition
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::TorqueMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::AutoRunMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::MoveToStartMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::SemiAutoMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::ManualCartMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Motion Mode: Initialized state: logic::ManualJointMode
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::InitState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::ReferencingState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::SaveConfigurationState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic:😮ffState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic:😮ffToIdleState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::IdleToOffState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::IdleState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::IdleToEngagedState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic:😛ausedToIdleState
2025-03-28 07:37:35.286 +0000 [INFO_SM] Robot State: Initialized state: logic::EngagedToPausedState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::EngagedState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::EStopResetState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::EStopOffState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::EStopOpenCircState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::ToForcedIdleState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::ForcedIdleState
2025-03-28 07:37:35.287 +0000 [INFO_SM] Robot State: Initialized state: logic::ForcedIdleResetState
2025-03-28 07:37:35.310 +0000 [INFO] App Feature: WeavingMotion is disabled in the configuration
2025-03-28 07:37:35.310 +0000 [INFO] App Feature: adding 3 SignalGenerator
2025-03-28 07:37:35.310 +0000 [INFO] Task Logic_task stack is 1048576 bytes
2025-03-28 07:37:35.312 +0000 [INFO] App Feature: adding 3 SetpointGenerator
2025-03-28 07:37:35.321 +0000 [INFO] App Feature: Joystick is disabled in the configuration
2025-03-28 07:37:35.321 +0000 [INFO] Task Simulator_task stack is 1048576 bytes
2025-03-28 07:37:35.335 +0000 [INFO] Task Control_task stack is 1048576 bytes
2025-03-28 07:37:35.347 +0000 [INFO] Task IO_task stack is 1048576 bytes
2025-03-28 07:37:35.350 +0000 [INFO] Task Comm_task stack is 1048576 bytes
2025-03-28 07:37:35.838 +0000 [ERROR] Failed to add link, path not found: root/Ethercat/GCC/error
2025-03-28 07:37:35.838 +0000 [ERROR] Failed to add link, path not found: root/Ethercat/Robot/error
2025-03-28 07:37:35.840 +0000 [WARNING] Destination root/ManipulatorControl/:fromInterp/motion_gen_command[0] has multiple sources: root/MotionInterpreter/:toCtrl/motion_gen_command[0:1], root/MotionJSInterpreter/:toCtrl/motion_gen_command[0:1]
2025-03-28 07:37:35.840 +0000 [WARNING] Destination root/ManipulatorControl/:fromInterp/move_command_ptr[0] has multiple sources: root/MotionInterpreter/:toCtrl/move_command_ptr[0:1], root/MotionJSInterpreter/:toCtrl/move_command_ptr[0:1]
2025-03-28 07:37:35.840 +0000 [WARNING] Destination root/Logic/:interpToMode/mode_command[0] has multiple sources: root/MotionInterpreter/:toMode/mode_command[0:1], root/MotionJSInterpreter/:toMode/mode_command[0:1]
2025-03-28 07:37:35.840 +0000 [ERROR] Failed to SetParameters, path not found: root/Ethercat/GCC/EL6910-01/Outputs/oSTONotActive
2025-03-28 07:37:35.840 +0000 [INFO] Applying SetpointGenerator Links
2025-03-28 07:37:35.841 +0000 [ERROR] Failed to add link, path not found: root/MachineControl/jointExternalInput1
2025-03-28 07:37:35.841 +0000 [ERROR] Failed to add link, path not found: root/MachineControl/jointExternalInput1
2025-03-28 07:37:35.841 +0000 [ERROR] Failed to add link, path not found: root/MachineControl/jointExternalInput1
2025-03-28 07:37:35.841 +0000 [INFO] Applying SignalGenerator Links
2025-03-28 07:37:35.842 +0000 [ERROR] Failed to add link, path not found: root/MachineControl/jointExternalInput2
2025-03-28 07:37:35.842 +0000 [ERROR] Failed to add link, path not found: root/MachineControl/jointExternalInput2
2025-03-28 07:37:35.842 +0000 [ERROR] Failed to add link, path not found: root/MachineControl/jointExternalInput2
2025-03-28 07:37:35.899 +0000 [INFO] Task Comm_task PID: 519 is running on CPUs: [], Scheduler Policy: SCHED_OTHER, Priority: 0, Offset: 100000 (ns)
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::Idle
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::StopCommand
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl:😛rogramReceived
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::NoCommand
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::MotionNotAllowed
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::MoveCommand
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::Moving
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::SetCommand
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::WaitCommand
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Initialized state: mcx::motion::motion_sl::MoveToStartCommand
2025-03-28 07:37:35.899 +0000 [INFO_SM] MotionJS: Enter state: mcx::motion::motion_sl::Idle
2025-03-28 07:37:35.899 +0000 [INFO] Distributed Clock: domain: 0, device: 3, assign_active: 0x300, cycle_time_sync0: 1000000, shift_time_sync0: 0, cycle_time_sync1: 0, shift_time_sync1: 0
2025-03-28 07:37:35.899 +0000 [INFO] Distributed Clock: domain: 0, device: 4, assign_active: 0x300, cycle_time_sync0: 1000000, shift_time_sync0: 0, cycle_time_sync1: 0, shift_time_sync1: 0
2025-03-28 07:37:35.899 +0000 [INFO] Distributed Clock: domain: 0, device: 5, assign_active: 0x300, cycle_time_sync0: 1000000, shift_time_sync0: 0, cycle_time_sync1: 0, shift_time_sync1: 0
2025-03-28 07:37:35.899 +0000 [INFO] Distributed Clock: domain: 0, device: 6, assign_active: 0x300, cycle_time_sync0: 1000000, shift_time_sync0: 0, cycle_time_sync1: 0, shift_time_sync1: 0
2025-03-28 07:37:35.899 +0000 [INFO] Distributed Clock: domain: 0, device: 7, assign_active: 0x300, cycle_time_sync0: 1000000, shift_time_sync0: 0, cycle_time_sync1: 0, shift_time_sync1: 0
2025-03-28 07:37:35.899 +0000 [INFO] Distributed Clock: domain: 0, device: 8, assign_active: 0x300, cycle_time_sync0: 1000000, shift_time_sync0: 0, cycle_time_sync1: 0, shift_time_sync1: 0
2025-03-28 07:37:35.899 +0000 [INFO] Enabled Distributed Clock for EtherCAT master id: 0 driver name: EtherLAB
2025-03-28 07:37:35.899 +0000 [INFO] Task Control_task PID: 517 is running on CPUs: [0], Scheduler Policy: SCHED_FIFO, Priority: 80, Offset: 550000 (ns)
2025-03-28 07:37:35.899 +0000 [INFO] Task Logger_task PID: 508 is running on CPUs: [], Scheduler Policy: SCHED_OTHER, Priority: 0, Offset: 100000 (ns)
2025-03-28 07:37:35.899 +0000 [INFO] Task IO_task PID: 518 is running on CPUs: [], Scheduler Policy: SCHED_FIFO, Priority: 1, Offset: 100000 (ns)
2025-03-28 07:37:35.899 +0000 [INFO] Task Simulator_task PID: 516 is running on CPUs: [], Scheduler Policy: SCHED_FIFO, Priority: 1, Offset: 100000 (ns)
2025-03-28 07:37:35.899 +0000 [INFO] Linking PDO Inputs
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 1/TxPDO Mapping 1/Statusword --> root/DriveLogic/driveStatusWord[0]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 1/TxPDO Mapping 1/Position actual value --> root/AxisControl/actuatorControlLoops/actuatorControlLoop01/motorPositionActual[0]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 2/TxPDO Mapping 1/Statusword --> root/DriveLogic/driveStatusWord[1]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 2/TxPDO Mapping 1/Position actual value --> root/AxisControl/actuatorControlLoops/actuatorControlLoop02/motorPositionActual[0]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 3/TxPDO Mapping 1/Statusword --> root/DriveLogic/driveStatusWord[2]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 3/TxPDO Mapping 1/Position actual value --> root/AxisControl/actuatorControlLoops/actuatorControlLoop03/motorPositionActual[0]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 4/TxPDO Mapping 1/Statusword --> root/DriveLogic/driveStatusWord[3]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 4/TxPDO Mapping 1/Position actual value --> root/AxisControl/actuatorControlLoops/actuatorControlLoop04/motorPositionActual[0]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 5/TxPDO Mapping 1/Statusword --> root/DriveLogic/driveStatusWord[4]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 5/TxPDO Mapping 1/Position actual value --> root/AxisControl/actuatorControlLoops/actuatorControlLoop05/motorPositionActual[0]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 6/TxPDO Mapping 1/Statusword --> root/DriveLogic/driveStatusWord[5]
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/Ethercat/RobotNoFSoE/SOMANET 6/TxPDO Mapping 1/Position actual value --> root/AxisControl/actuatorControlLoops/actuatorControlLoop06/motorPositionActual[0]
2025-03-28 07:37:35.900 +0000 [INFO] Linking PDO Outputs
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveControlWord[0] --> root/Ethercat/RobotNoFSoE/SOMANET 1/RxPDO Mapping 1/Controlword
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveOpMode[0] --> root/Ethercat/RobotNoFSoE/SOMANET 1/RxPDO Mapping 1/Modes of operation
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/AxisControl/actuatorControlLoops/actuatorControlLoop01/motorPositionTarget[0] --> root/Ethercat/RobotNoFSoE/SOMANET 1/RxPDO Mapping 1/Target position
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveControlWord[1] --> root/Ethercat/RobotNoFSoE/SOMANET 2/RxPDO Mapping 1/Controlword
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveOpMode[1] --> root/Ethercat/RobotNoFSoE/SOMANET 2/RxPDO Mapping 1/Modes of operation
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/AxisControl/actuatorControlLoops/actuatorControlLoop02/motorPositionTarget[0] --> root/Ethercat/RobotNoFSoE/SOMANET 2/RxPDO Mapping 1/Target position
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveControlWord[2] --> root/Ethercat/RobotNoFSoE/SOMANET 3/RxPDO Mapping 1/Controlword
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveOpMode[2] --> root/Ethercat/RobotNoFSoE/SOMANET 3/RxPDO Mapping 1/Modes of operation
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/AxisControl/actuatorControlLoops/actuatorControlLoop03/motorPositionTarget[0] --> root/Ethercat/RobotNoFSoE/SOMANET 3/RxPDO Mapping 1/Target position
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveControlWord[3] --> root/Ethercat/RobotNoFSoE/SOMANET 4/RxPDO Mapping 1/Controlword
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveOpMode[3] --> root/Ethercat/RobotNoFSoE/SOMANET 4/RxPDO Mapping 1/Modes of operation
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/AxisControl/actuatorControlLoops/actuatorControlLoop04/motorPositionTarget[0] --> root/Ethercat/RobotNoFSoE/SOMANET 4/RxPDO Mapping 1/Target position
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveControlWord[4] --> root/Ethercat/RobotNoFSoE/SOMANET 5/RxPDO Mapping 1/Controlword
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveOpMode[4] --> root/Ethercat/RobotNoFSoE/SOMANET 5/RxPDO Mapping 1/Modes of operation
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/AxisControl/actuatorControlLoops/actuatorControlLoop05/motorPositionTarget[0] --> root/Ethercat/RobotNoFSoE/SOMANET 5/RxPDO Mapping 1/Target position
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveControlWord[5] --> root/Ethercat/RobotNoFSoE/SOMANET 6/RxPDO Mapping 1/Controlword
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/DriveLogic/driveOpMode[5] --> root/Ethercat/RobotNoFSoE/SOMANET 6/RxPDO Mapping 1/Modes of operation
2025-03-28 07:37:35.900 +0000 [INFO] Connected root/AxisControl/actuatorControlLoops/actuatorControlLoop06/motorPositionTarget[0] --> root/Ethercat/RobotNoFSoE/SOMANET 6/RxPDO Mapping 1/Target position
2025-03-28 07:37:35.900 +0000 [INFO] Linking Domain System Mode
2025-03-28 07:37:35.900 +0000 [INFO] Linking SDO
2025-03-28 07:37:35.901 +0000 [INFO] Task Fieldbus_task PID: 511 is running on CPUs: [1], Scheduler Policy: SCHED_FIFO, Priority: 80, Offset: 0 (ns)
2025-03-28 07:37:35.919 +0000 [INFO] Task Logic_task PID: 515 is running on CPUs: [], Scheduler Policy: SCHED_FIFO, Priority: 1, Offset: 1000000 (ns)
2025-03-28 07:37:37.902 +0000 [INFO] Publisher reloading certificate
2025-03-28 07:37:37.902 +0000 [INFO] RPC reloading certificate
2025-03-28 07:37:37.927 +0000 [INFO_SM] Motion Mode: Enter state: logic::InitMode
2025-03-28 07:37:37.927 +0000 [INFO_SM] Robot State: Enter state: logic::InitState
2025-03-28 07:37:37.927 +0000 [INFO_SM] Robot State: Enter state: logic::EStopOpenCircState
2025-03-28 07:37:37.927 +0000 [INFO_SM] Robot State: Enter state: logic::EStopOffState
2025-03-28 07:37:37.927 +0000 [INFO_SM] Robot State: State: logic::InitState Event: emergencyStop [done]
2025-03-28 07:37:37.927 +0000 [INFO_SM] Robot State: E-Stop id: 501 (0x1f5) subsystem: 0 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Motion Mode: Enter state: logic::ToPauseModeTransition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Motion Mode: State: logic::InitMode Event: gotoPauseModeEvent [done]
2025-03-28 07:37:37.937 +0000 [INFO] Goto pause mode
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: emergencyStop [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: E-Stop id: 607 (0x25f) subsystem: 1 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: emergencyStop [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: E-Stop id: 607 (0x25f) subsystem: 2 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: emergencyStop [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: E-Stop id: 607 (0x25f) subsystem: 3 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: emergencyStop [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: E-Stop id: 607 (0x25f) subsystem: 4 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: emergencyStop [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: E-Stop id: 607 (0x25f) subsystem: 5 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: emergencyStop [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: E-Stop id: 607 (0x25f) subsystem: 6 slave info: 0
2025-03-28 07:37:37.937 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: delayEvent [repeat]
2025-03-28 07:37:37.937 +0000 [INFO] Drive1 mode: Cyclic Sync. Position
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive1: State: mcx::drive::NotReadyToSwitchOn Event: Switch Mode [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive1: Enter state: mcx::drive::Transition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive1: State: mcx::drive::NotReadyToSwitchOn Event: Fault Acknowledge [done]
2025-03-28 07:37:37.937 +0000 [INFO] Drive2 mode: Cyclic Sync. Position
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive2: State: mcx::drive::NotReadyToSwitchOn Event: Switch Mode [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive2: Enter state: mcx::drive::Transition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive2: State: mcx::drive::NotReadyToSwitchOn Event: Fault Acknowledge [done]
2025-03-28 07:37:37.937 +0000 [INFO] Drive3 mode: Cyclic Sync. Position
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive3: State: mcx::drive::NotReadyToSwitchOn Event: Switch Mode [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive3: Enter state: mcx::drive::Transition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive3: State: mcx::drive::NotReadyToSwitchOn Event: Fault Acknowledge [done]
2025-03-28 07:37:37.937 +0000 [INFO] Drive4 mode: Cyclic Sync. Position
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive4: State: mcx::drive::NotReadyToSwitchOn Event: Switch Mode [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive4: Enter state: mcx::drive::Transition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive4: State: mcx::drive::NotReadyToSwitchOn Event: Fault Acknowledge [done]
2025-03-28 07:37:37.937 +0000 [INFO] Drive5 mode: Cyclic Sync. Position
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive5: State: mcx::drive::NotReadyToSwitchOn Event: Switch Mode [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive5: Enter state: mcx::drive::Transition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive5: State: mcx::drive::NotReadyToSwitchOn Event: Fault Acknowledge [done]
2025-03-28 07:37:37.937 +0000 [INFO] Drive6 mode: Cyclic Sync. Position
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive6: State: mcx::drive::NotReadyToSwitchOn Event: Switch Mode [done]
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive6: Enter state: mcx::drive::Transition
2025-03-28 07:37:37.937 +0000 [INFO_SM] Drive6: State: mcx::drive::NotReadyToSwitchOn Event: Fault Acknowledge [done]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Motion Mode: State: logic::ToPauseModeTransition Event: waitingPauseModeEvent [repeat]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive1: Enter state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive1: State: mcx::drive::Transition Event: Fault Reset [done]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive2: Enter state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive2: State: mcx::drive::Transition Event: Fault Reset [done]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive3: Enter state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive3: State: mcx::drive::Transition Event: Fault Reset [done]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive4: Enter state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive4: State: mcx::drive::Transition Event: Fault Reset [done]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive5: Enter state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive5: State: mcx::drive::Transition Event: Fault Reset [done]
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive6: Enter state: mcx::drive::SwitchOnDisabled
2025-03-28 07:37:37.947 +0000 [INFO_SM] Drive6: State: mcx::drive::Transition Event: Fault Reset [done]
2025-03-28 07:37:38.470 +0000 [INFO_SM] Motion Mode: Enter state: logic:😛auseMode
2025-03-28 07:37:38.470 +0000 [INFO_SM] Motion Mode: State: logic::ToPauseModeTransition Event: waitingPauseModeEvent [done]
2025-03-28 07:37:38.470 +0000 [INFO_SM] Robot State: Enter state: logic::EStopResetState
2025-03-28 07:37:38.470 +0000 [INFO_SM] Robot State: State: logic::EStopOffState Event: acknowledgeErrors [done]
2025-03-28 07:37:38.570 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: setNoEStopRelay [done]
2025-03-28 07:37:38.670 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: delayEvent [repeat]
2025-03-28 07:37:38.567 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: resetEStopRelay [repeat]
2025-03-28 07:37:39.670 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: resetEStopRelay [done]
2025-03-28 07:37:39.770 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: delayEvent [repeat]
2025-03-28 07:37:39.577 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: waitForEcatRecover [done]
2025-03-28 07:37:39.587 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: delayEvent [repeat]
2025-03-28 07:37:40.587 +0000 [INFO_SM] Robot State: Enter state: logic:😮ffState
2025-03-28 07:37:40.587 +0000 [INFO_SM] Robot State: State: logic::EStopResetState Event: resetEStopErrors [done]
2025-03-28 07:37:40.597 +0000 [INFO_SM] Robot State: Warning id: 108 (0x6c) subsystem: 0 slave info: 0
2025-03-28 07:37:40.597 +0000 [INFO_SM] Robot State: State: logic:😮ffState Event: delayEvent [repeat]
2025-03-28 07:37:41.970 +0000 [INFO_SM] Robot State: State: logic:😮ffState Event: waitPersistentData [done]
2025-03-28 07:37:41.107 +0000 [INFO_SM] Robot State: State: logic:😮ffState Event: loadPersistentData [done]
2025-03-28 07:37:41.117 +0000 [INFO_SM] Robot State: State: logic:😮ffState Event: waitPersistentData [done]
2025-03-28 07:37:41.127 +0000 [INFO_SM] Robot State: State: logic:😮ffState Event: checkPersistentData [done]
2025-03-28 07:37:41.137 +0000 [INFO_SM] Robot State: State: logic:😮ffState Event: waitPersistentData [done]
2025-03-28 07:38:40.861 +0000 [INFO] RPC reloading certificate
2025-03-28 07:38:40.862 +0000 [INFO] Publisher reloading certificate
2025-03-28 07:39:11.777 +0000 [INFO] RPC reloading certificate
2025-03-28 07:39:11.777 +0000 [INFO] Publisher reloading certificate
<-- End of log_2025-03-28_07-37-35.dat
Did I do something wrong in the configuration?