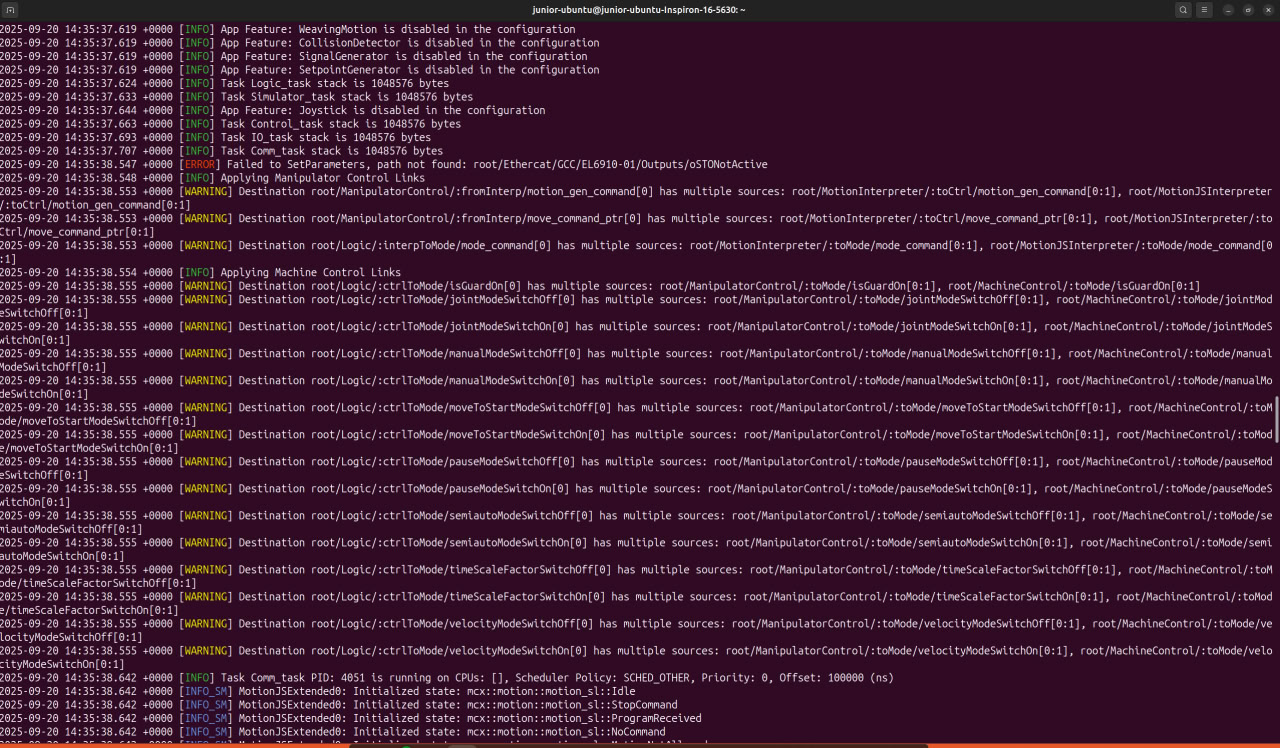
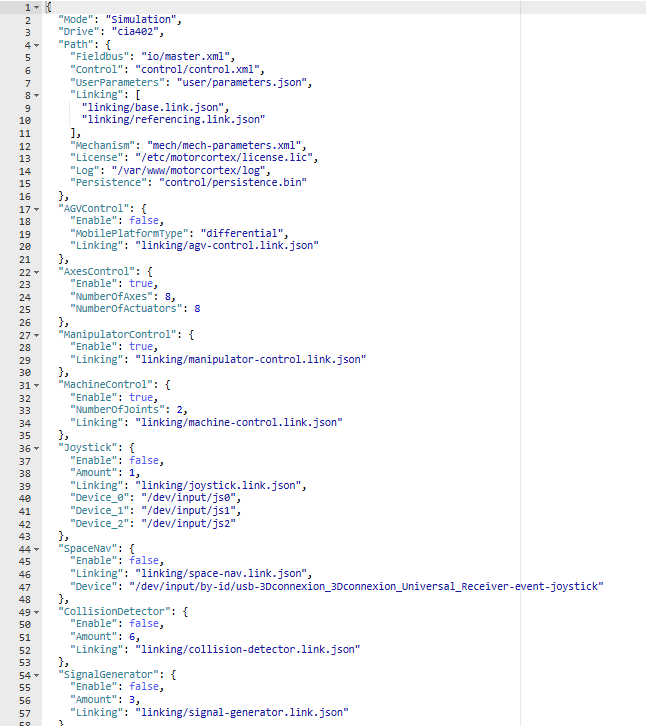
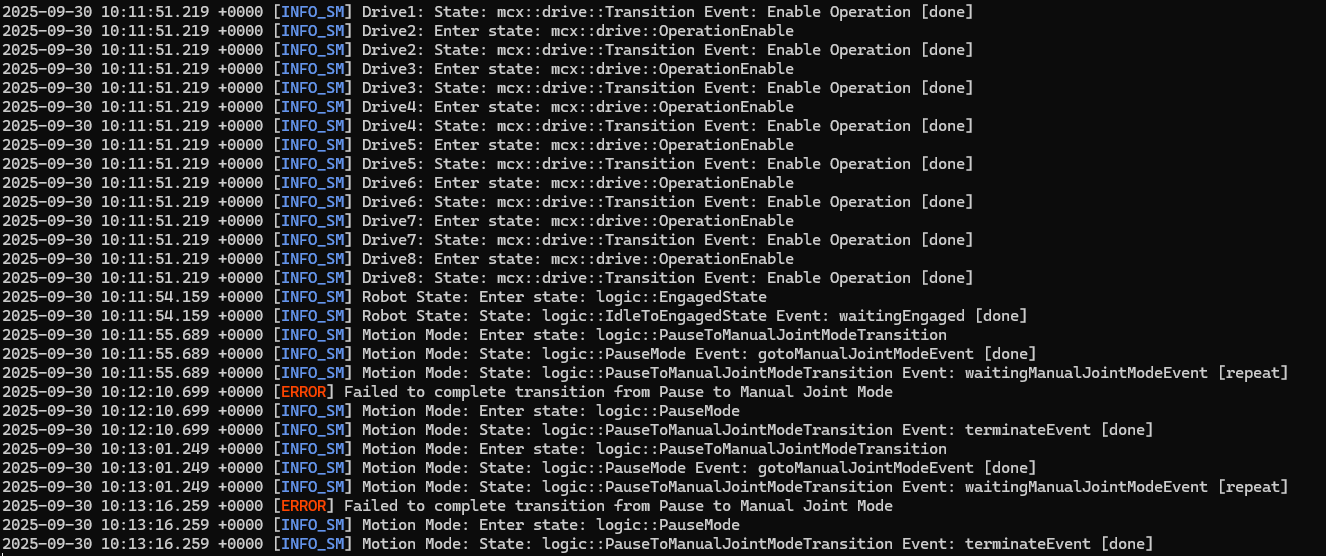
I followed your tips but when I try to switch in manual joint mode an error appear (see below). I updated also the file "machine-control.link.json" as follow. What else is missing on the configuration?
{
"Version": "1.0.0",
"Groups": [
{
"Name": "From Logic To Control",
"SystemMode": "All",
"Enable": true,
"Links": [
{
"Source": {
"Path": "root/Logic/:stateToCtrl"
},
"Destination": {
"Path": "root/MachineControl/:fromState"
}
},
{
"Source": {
"Path": "root/Logic/:modeToCtrl"
},
"Destination": {
"Path": "root/MachineControl/:fromMode"
}
}
]
},
{
"Name": "From Control To Logic",
"SystemMode": "All",
"Enable": true,
"Links": [
{
"Source": {
"Path": "root/MachineControl/:toMode"
},
"Destination": {
"Path": "root/Logic/:ctrlToMode"
}
}
]
},
{
"Name": "Between Axis Control and Machine Control",
"SystemMode": "All",
"Enable": true,
"Links": [
{
"Source": {
"Path": "root/AxesControl/axesPositionsActual",
"Index": 6,
"Length": 2
},
"Destination": {
"Path": "root/MachineControl/actualJointPositionsFiltered",
"Index": 0
}
},
{
"Source": {
"Path": "root/MachineControl/jointPositionsTarget",
"Index": 0
},
"Destination": {
"Path": "root/AxesControl/axesPositionsInput",
"Index": 6,
"Length": 2
}
},
{
"Source": {
"Path": "root/MachineControl/jointVelocitiesTarget",
"Index": 0
},
"Destination": {
"Path": "root/AxesControl/axesVelocitiesInput",
"Index": 6,
"Length": 2
}
},
{
"Source": {
"Path": "root/MachineControl/jointAccelerationsTarget",
"Index": 0
},
"Destination": {
"Path": "root/AxesControl/axesAccelerationsInput",
"Index": 6,
"Length": 2
}
},
{
"Source": {
"Path": "root/AxesControl/axesIsOpenLoop"
},
"Destination": {
"Path": "root/MachineControl/jointIsOpenLoop"
}
}
]
},
{
"Name": "DefaultModeSetting",
"SystemMode": "All",
"Enable": true,
"SetParameters": [
{
"Path": "root/MachineControl/gotoJogMode",
"Value": true
}
]
},
{
"Name": "PositionMode",
"SystemMode": "All",
"Enable": true,
"SetParameters": [
{
"Path": "root/MachineControl/gotoVelocityMode",
"Value": false
}
]
},
{
"Name": "VelocityMode",
"SystemMode": "All",
"Enable": false,
"SetParameters": [
{
"Path": "root/MachineControl/gotoVelocityMode",
"Value": true
}
]
}
]
}